


机器视觉软件在感兴趣区域中的应用
2014/2/26 12:08:08
在采用机器视觉技术对部件进行检测时,并不一定需要对整个部件进行检测,即不需要处理相机所拍摄的整个图形,而只需要对部件上的一部分进行检测即可。如果对整个图形进行处理,将增加许多处理时间。机器视觉软件sherlock制定了多种不同类型的PEEK工具,包括面PEEK、线PEEK和点PEEK,使用户能够根据需要选择感兴趣区域,处理图形上有关的区域,从而极大地缩短处理时间,参见图1。

面PEEK(感兴趣区域)
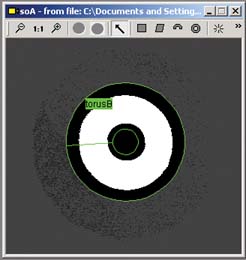
大多数机器视觉软件只能处理矩形PEEK,但是在某些情况下,所需要检测的图形特征并不是矩形,而可能是平行四边形、环面等形状。如果利用矩形PEEK对其进行处理,将增加处理区域,从而增加处理时间。针对这种情况,Sherlock软件制定了四种面PEEK(感兴趣区域):矩形(rect peek)、平行四边形(parallelogram peek)、环面(annulus peek)、圆环面(torus peek)。
在某些图形中,并不一定是对矩形区域进行处理,有时候可能处理的是平行四边形、或一个圆环面,如果只是利用矩形PEEK,所处理的区域就将变大,处理时间增加。这时如果利用相应的平行四边形PEEK或圆环面PEEK,就可以减少处理的区域,从而降低处理时间,如图2所示。
线PEEK(感兴趣区域):
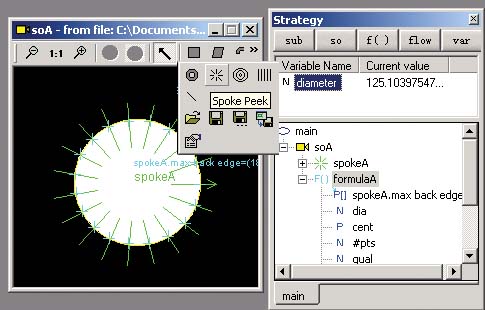
在利用机器视觉进行工业检测时,如果要对零部件进行尺寸测量,通常需要找出所检测的零部件的边缘,这时可以利用线PEEK来找到边缘点,然后进行尺寸测量。但是在实际检测中,所要检测的零部件的边缘并不是按线形分布,如圆的边缘或齿轮的齿等。如果只利用直线进行边缘检测,将很费时费力。Sherlock软件制定了六种线形PEEK,可以很方便地进行边缘检测。这六种线PEEK包括单线(line peek)、圆(circle peek)、圆弧(arc peek)、轮辐形(spoke peek)、牛眼形(bull's eye peek)、耙形(rake peek)。
如图3,当用户检测圆的直径时,只需要利用轮辐形PEEK来找到圆的边缘点,然后利用sherlock中拟和圆的函数,用这些边缘点来拟和一个圆,从而很方便地求出圆的直径。
面PEEK(感兴趣区域)
大多数机器视觉软件只能处理矩形PEEK,但是在某些情况下,所需要检测的图形特征并不是矩形,而可能是平行四边形、环面等形状。如果利用矩形PEEK对其进行处理,将增加处理区域,从而增加处理时间。针对这种情况,Sherlock软件制定了四种面PEEK(感兴趣区域):矩形(rect peek)、平行四边形(parallelogram peek)、环面(annulus peek)、圆环面(torus peek)。
在某些图形中,并不一定是对矩形区域进行处理,有时候可能处理的是平行四边形、或一个圆环面,如果只是利用矩形PEEK,所处理的区域就将变大,处理时间增加。这时如果利用相应的平行四边形PEEK或圆环面PEEK,就可以减少处理的区域,从而降低处理时间,如图2所示。
线PEEK(感兴趣区域):
在利用机器视觉进行工业检测时,如果要对零部件进行尺寸测量,通常需要找出所检测的零部件的边缘,这时可以利用线PEEK来找到边缘点,然后进行尺寸测量。但是在实际检测中,所要检测的零部件的边缘并不是按线形分布,如圆的边缘或齿轮的齿等。如果只利用直线进行边缘检测,将很费时费力。Sherlock软件制定了六种线形PEEK,可以很方便地进行边缘检测。这六种线PEEK包括单线(line peek)、圆(circle peek)、圆弧(arc peek)、轮辐形(spoke peek)、牛眼形(bull's eye peek)、耙形(rake peek)。
如图3,当用户检测圆的直径时,只需要利用轮辐形PEEK来找到圆的边缘点,然后利用sherlock中拟和圆的函数,用这些边缘点来拟和一个圆,从而很方便地求出圆的直径。




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

工业机器人控制系统的开放体系结构
工业机器人离线编程及无碰撞路径规划系统的开发研究
工业机器人手臂结构的有限元分析与研究
工业机器人通用控制器研究开发
工业机器人网络控制与编程